|
|||||
|
|
| 激光扫描多三维视图的全自动无缝镶嵌 | |
| 引用本文: | 梁栋, 王红平, 刘修国, 沈永林. 基于平面基元组的建筑物场景点云自动配准方法[J]. 武汉大学学报 ( 信息科学版), 2016, 41(12): 1613-1618. DOI: 10.13203/j.whugis20140682 |
| 作者姓名: | 梁栋 王红平 刘修国 沈永林 |
| 作者单位: | 中国地质大学(武汉)信息工程学院, 湖北 武汉, 430074 |
| 基金项目: | 国家自然科学基金(41471355);中央高校基本科研业务费专项资金(CUGL120267) |
| 摘 要: | 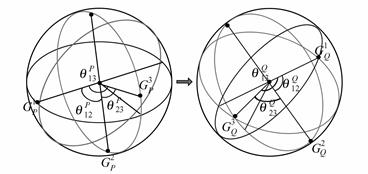 三维激光扫描点云在建筑物场景配准中存在同名特征难以区分、投票匹配算法复杂度高等问题。为此,提出了一种基于平面基元组的建筑物场景点云自动配准方法。平面基元组被定义为具有近似相同法向量的点云面集合。 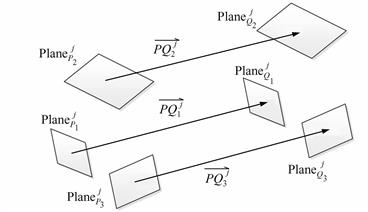 该方法从点云中提取平面基元,根据平面法向量方向,划分平面基元组,然后借助基元组搜索同名平面,利用单位四元数法估计转换参数。实验结果表明,该方法适用于建筑物场景,能够实现点云的自动配准。 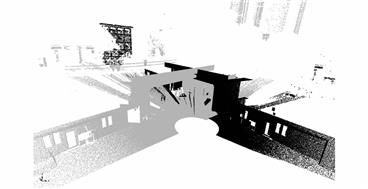 |
| 关 键 词: | 建筑物 平面提取 层次聚类 平面基元组 点云配准 随机采样一致性(RANSAC) |
| 收稿时间: | 2015-05-20 |
Automatic Seamless Registration of 3D Multiple Range Views |
|
| LIANG Dong, WANG Hongping, LIU Xiuguo, SHEN Yonglin. Automatic Registration of Building's Point Clouds Based on Planar Primitive Groups[J]. Geomatics and Information Science of Wuhan University, 2016, 41(12): 1613-1618. DOI: 10.13203/j.whugis20140682 | |
| Authors: | LIANG Dong WANG Hongping LIU Xiuguo SHEN Yonglin |
| Affiliation: | Faculty of Information Engineering, China University of Geosciences, Wuhan 430074, China |
| Abstract: | In this paper, we present an automatic registration method based on planar primitive groups for building point clouds. This method distinguishes planar features with similar structures found in urban scenes, and reduces feature matching search complexity. In the method, planar patches with similar normal vectors are defined as a planar primitive group. We extract planes from point clouds as planar primitives. Using a threshold, we cluster the planar primitives with the similar normal vectors into groups. Finally, we match the planar primitives in groups, and calculate transformation parameters with an extended quaternion method. Experimental results show that this method is effective for automatic registration of building point clouds. |
| Keywords: | building plane extraction hierarchical clustering planar primitive group point clouds registration RANSAC |
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 | |
| 点击此处可从《武汉大学学报(信息科学版)》下载全文 | |