| 一种融合行人预测信息的局部路径规划算法 |
| |
| 引用本文: | 周于涛, 吴华意, 成洪权, 郑杰, 李学锡. 结合自注意力机制和结伴行为特征的行人轨迹预测模型[J]. 武汉大学学报 ( 信息科学版), 2020, 45(12): 1989-1996. DOI: 10.13203/j.whugis20200159 |
| |
| 作者姓名: | 周于涛 吴华意 成洪权 郑杰 李学锡 |
| |
| 作者单位: | 1.武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉,430079;2.江苏易图地理信息科技股份有限公司,江苏 扬州,225009 |
| |
| 基金项目: | 国家重点研发计划(2017YFB0503800) |
| |
| 摘 要: | 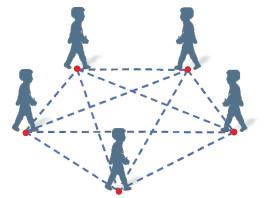
理解并准确预测行人的移动轨迹,对提高自动驾驶技术的水平,减少交通事故的发生有重要的意义。针对现有轨迹预测方法预测精度不高,对行人交互信息利用不充分等问题,提出了一种结合自注意力机制和结伴行为特征的行人轨迹预测模型,该模型考虑了每个行人的运动信息及其与周围行人的交互作用,使用循环神经网络和图卷积网络分别对行人的行走状态和行人间的交互进行建模。在图卷积网络中,定义图的节点表示行人的运动信息,图的边表示行人之间的交互,使用自注意力机制计算行人间的交互程度。
此外,为了增加模型捕捉结伴行走行为特征的能力,提高对该类轨迹预测的精度,提出了同伴损失函数的概念。在公共数据集上的实验表明,该模型在预测精度上相比其他方法有较大的提升。

|
| 关 键 词: | 行人轨迹预测 自注意力机制 图卷积网络 循环神经网络 深度学习 |
| 收稿时间: | 2020-04-17 |
|
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 |
|
点击此处可从《武汉大学学报(信息科学版)》下载免费的PDF全文 |
|