| 一种强跟踪自适应状态估计器及其仿真研究 |
| |
| 引用本文: | 徐韩, 曾超, 黄清华. 一种基于渐消因子的区间卡尔曼滤波器方法[J]. 武汉大学学报 ( 信息科学版), 2017, 42(12): 1826-1833, 1839. DOI: 10.13203/j.whugis20150567 |
| |
| 作者姓名: | 徐韩 曾超 黄清华 |
| |
| 作者单位: | 1.南京理工大学电子工程与光电技术学院, 江苏 南京, 210094;2.中国工程物理研究院电子工程研究所, 四川 绵阳, 621000 |
| |
| 基金项目: | 国家自然科学基金委员会与中国工程物理研究院联合基金(U1330133) |
| |
| 摘 要: | 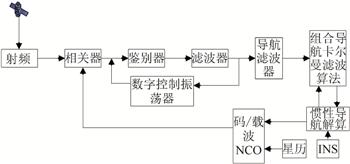
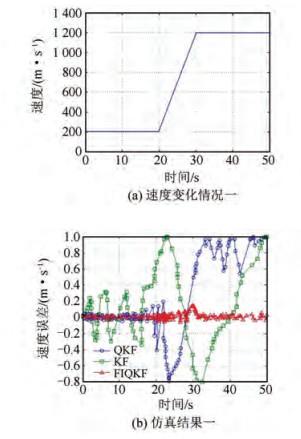
在噪声环境中,运动目标发生稳态突变会降低卡尔曼滤波器的滤波性能,进而导致组合导航的可靠性降低,导航系统抗干扰能力下降,影响导航的精确度。为了提高卡尔曼滤波器性能,提高抗干扰能力和导航精度,在采用基于卡尔曼滤波器的超紧耦合同时,提出一种新型的基于渐消因子的区间卡尔曼滤波器算法。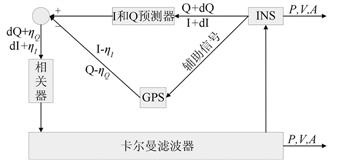
该算法通过引入渐消因子和区间矩阵对滤波器增益矩阵进行实时调整,并利用区间运算中的交集运算将各种误差源约束到交集区间,进而保证在区间运算中保真集合映射的完备性并取得最优化。结果显示,该算法能够克服原有滤波器算法的缺陷,在噪声环境中提升对稳态突变目标的跟踪能力,且在噪声中滤波器效果提高,算法计算量没有明显增加。
|
| 关 键 词: | 超紧耦合 锁相环 积分卡尔曼滤波器 稳态突变 区间运算 |
| 收稿时间: | 2016-07-05 |
|
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 |
|
点击此处可从《武汉大学学报(信息科学版)》下载免费的PDF全文 |
|