Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms |
| |
| Affiliation: | 1. Grumets Research Group, Departament de Geografia, Universitat Autònoma de Barcelona, Departament de Geografia Office B1092, Edifici B. Universitat Autònoma de Barcelona, 08193 Bellaterra, Catalonia, Spain;2. HEMAV S.L. Edifici RDIT. Office 0007. CEsteve Terrades, 1. Parc Mediterrani de la Tecnologia, 08860 Castelldefels, Catalonia, Spain;3. Universitat Autònoma de Barcelona, Departament de Geografia Office B1092. Edifici B, Universitat Autònoma de Barcelona, 08193 Bellaterra, Catalonia, Spain;4. Grumets Research Group, Departament de Geografia, Universitat Autònoma de Barcelona, Departament de Geografia Office B1094. Edifici B. Universitat Autònoma de Barcelona. 08193 Bellaterra, Catalonia, Spain |
| |
| Abstract: | 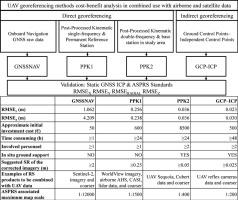
This work is aimed at the environmental remote sensing community that uses UAV optical frame imagery in combination with airborne and satellite data. Taking into account the economic costs involved and the time investment, we evaluated the fit-for-purpose accuracy of four positioning methods of UAV-acquired imagery: 1) direct georeferencing using the onboard raw GNSS (GNSSNAV) data, 2) direct georeferencing using Post-Processed Kinematic single-frequency carrier-phase without in situ ground support (PPK1), 3) direct georeferencing using Post-Processed Kinematic double-frequency carrier-phase GNSS data with in situ ground support (PPK2), and 4) indirect georeferencing using Ground Control Points (GCP). We tested a multispectral sensor and an RGB sensor, onboard multicopter platforms. Orthophotomosaics at <0.05 m spatial resolution were generated with photogrammetric software. The UAV image absolute accuracy was evaluated according to the ASPRS standards, wherein we used a set of GCPs as reference coordinates, which we surveyed with a differential GNSS static receiver. The raw onboard GNSSNAV solution yielded horizontal (radial) accuracies of RMSEr≤1.062 m and vertical accuracies of RMSEz≤4.209 m; PPK1 solution gave decimetric accuracies of RMSEr≤0.256 m and RMSEz≤0.238 m; PPK2 solution, gave centimetric accuracies of RMSEr≤0.036 m and RMSEz≤0.036 m. These results were further improved by using the GCP solution, which yielded accuracies of RMSEr≤0.023 m and RMSEz≤0.030 m. GNSSNAV solution is a fast and low-cost option that is useful for UAV imagery in combination with remote sensing products, such as Sentinel-2 satellite data. PPK1, which can register UAV imagery with remote sensing products up to 0.25 m pixel size, as WorldView-like satellite imagery, airborne lidar or orthoimagery, has a higher economic cost than the GNSSNAV solution. PPK2 is an acceptable option for registering remote sensing products of up to 0.05 m pixel size, as with other UAV images. Moreover, PPK2 can obtain accuracies that are approximate to the usual UAV pixel size (e.g. co-register in multitemporal studies), but it is more expensive than PPK1. Although indirect georeferencing can obtain the highest accuracy, it is nevertheless a time-consuming task, particularly if many GCPs have to be placed. The paper also provides the approximate cost of each solution. |
| |
| Keywords: | UAV Drone Direct georeferencing Indirect georeferencing ASPRS standards Post-Processed Kinematic |
| 本文献已被 ScienceDirect 等数据库收录! |
|