|
|||||
|
|
| 国家综合PNT体系弹性概念 | |
| 引用本文: | 陈惟杰, 朱锋, 郭斐, 张小红. 不同水深层的GNSS信号特征分析及其导航场景聚类划分[J]. 武汉大学学报 ( 信息科学版), 2024, 49(1): 139-145. DOI: 10.13203/j.whugis20220048 |
| 作者姓名: | 陈惟杰 朱锋 郭斐 张小红 |
| 作者单位: | 1.武汉大学测绘学院,湖北 武汉,430079;2.湖北珞珈实验室,湖北 武汉,430079 |
| 基金项目: | 国家重点研发计划(2020YFB0505803);国家自然科学基金(42104021)。 |
| 摘 要: | 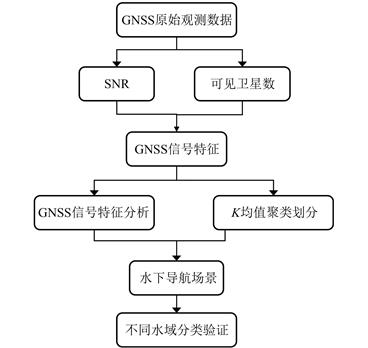 导航场景的划分对于自适应无缝导航定位服务具有重要意义。针对目前水上/水下导航场景划分简单、颗粒度不够的问题,通过采集位于不同水域内的全球导航卫星系统(global navigation satellite system,GNSS)观测数据,分析了不同水深层的GNSS观测信号质量与特征,结果表明,水下导航场景具有显著的分层性。考虑到导航场景具有分割、合并、联通等固有属性,通过  |
| 关 键 词: | GNSS 导航场景感知 水上水下场景 K均值聚类 |
| 收稿时间: | 2022-01-22 |
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 | |
| 点击此处可从《武汉大学学报(信息科学版)》下载全文 | |