| 引用本文: | 黄远宪, 周剑, 黄琦, 李必军, 王兰兰, 朱佳琳. 融合相机与激光雷达的目标检测、跟踪与预测[J]. 武汉大学学报 ( 信息科学版), 2024, 49(6): 945-951. DOI: 10.13203/j.whugis20210614 |
| 摘 要: | 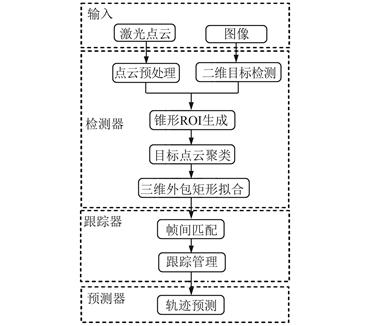
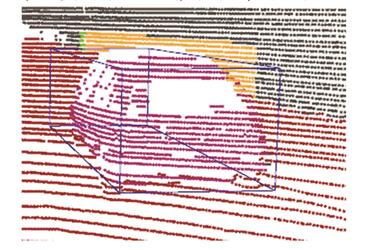
实时、鲁棒的三维动态目标感知系统是自动驾驶技术的关键。提出了一种融合单目相机和激光雷达的三维目标检测流程,首先,在图像上使用卷积神经网络进行二维目标检测,根据几何投影关系生成锥形感兴趣区域(region of interest, ROI),在ROI内对点云进行聚类,并拟合三维外包矩形;然后,基于外观特征和匈牙利算法对三维目标进行帧间匹配,并提出了一种基于四元有限状态机的跟踪器管理模型;最后,设计了一种利用车道信息的轨迹预测模型,对车辆轨迹进行预测。实验结果表明,在目标检测阶段,所提算法的准确率和召回率分别达到了92.5%和86.7%。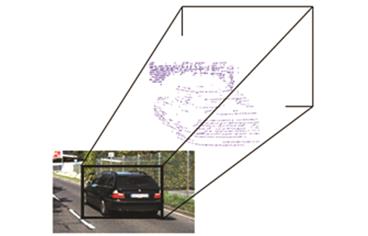
在仿真数据集上对轨迹预测算法进行测试,与现有算法相比,所提算法在直线、弧线和缓和曲线3种类型的车道上均有较小的均方根误差,且算法平均耗时约为25 ms,满足实时性要求。所提算法鲁棒、有效,在不同车道模型下均有较好的结果。
|