| 引用本文: | 崔晓珍, 周琪, 武东杰, 吴汶鸿, 陈步什, 仲训昱. GNSS/IMU与里程计紧-松耦合的因子图融合定位方法[J]. 武汉大学学报 ( 信息科学版), 2024, 49(10): 1911-1921. DOI: 10.13203/j.whugis20220321 |
| 摘 要: | 
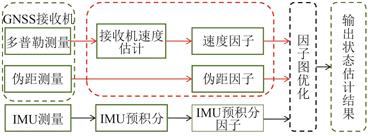
开展了不同深度的信息融合对微惯性导航(micro inertial navigation system,M-INS)与全球导航卫星系统(global navigation satellite system,GNSS)组成的导航系统精度的影响研究,以及室内外一体化定位研究。首先,基于因子图优化(factor graph optimization,FGO)算法分别建立M-INS/GNSS单点定位的松耦合系统和M-INS/伪距/多普勒速度的紧耦合系统,并通过实验验证紧耦合设计的优势。然后,将视觉惯性里程计(visual inertial odometry,VIO)因子以松耦合的方式接入紧耦合M-INS/GNSS系统的因子结构中,提出了基于FGO紧-松耦合的多源融合算法模型。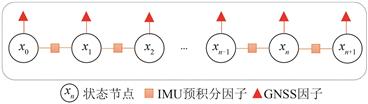
最后,通过实验验证系统的定位精度和室内外一体化定位能力。实验结果表明,在无法观测到4颗卫星而导致无法获得单点定位解时,M-INS/GNSS紧耦合系统的定位精度可以达到M-INS/GNSS松耦合系统的2倍;基于FGO的M-INS/GNSS/VIO紧-松耦合系统能够无缝应对室内外环境之间的变化,在GNSS或VIO任意一种传感器突然失效的情况下保证持续可靠定位,东、北向的平均误差比基于滤波方法的M-INS/GNSS/VIO系统精度分别提升了53.98%、54.74%。
|