| 三维场景建模中地物与地形匹配方法研究 |
| |
| 引用本文: | 杨克龙, 霍亮, 沈涛, 张孝勇, 耿明珠, 马娜. 顾及场景复杂度的三维模型与地形匹配方法研究[J]. 武汉大学学报 ( 信息科学版), 2024, 49(10): 1824-1830. DOI: 10.13203/j.whugis20220318 |
| |
| 作者姓名: | 杨克龙 霍亮 沈涛 张孝勇 耿明珠 马娜 |
| |
| 作者单位: | 1.北京建筑大学测绘与城市空间信息学院,北京,100044;2.自然资源部城市空间信息重点实验室,北京,102616;3.中国水产科学研究院,北京,100141 |
| |
| 基金项目: | 中国铁道科学研究院集团有限公司科研项目(2020YJ226)。 |
| |
| 摘 要: | 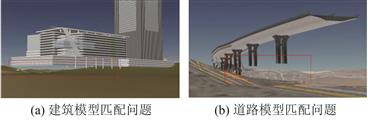
三维场景中三维模型与地形模型进行匹配时存在缝隙或地形淹没模型等问题,导致三维场景可视化效果不佳,难以满足风险监测、精细测量等领域的应用需求。针对该问题,提出了顾及场景复杂度的三维模型与地形模型匹配方法,解决了模型与地形之间的匹配问题。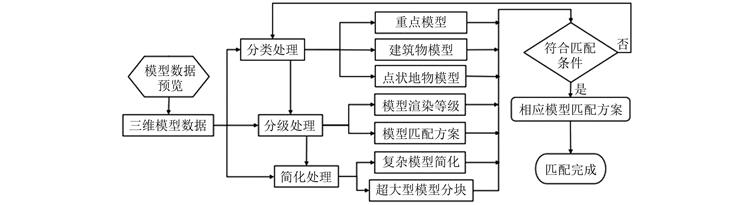
首先,结合三维模型特性改进了多源异构三维模型数据组织;然后,结合模型数据组织方案构建了三维场景复杂度评估模型;最后,在不同场景复杂度下,实现了顾及场景复杂度的多源异构三维模型与地形的精确匹配。研究结果表明,所提方法在保证三维模型渲染时实时帧率的同时,切实优化模型与地形之间的精确匹配问题,满足了多尺度观察三维场景要素及目视精确定位的要求。
|
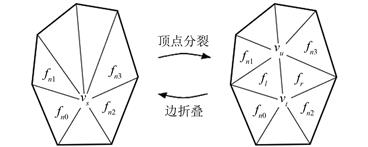
| 关 键 词: | 三维场景 场景复杂度 无缝集成 裂缝消除 网格重构 |
| 收稿时间: | 2022-12-25 |
|
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 |
|
点击此处可从《武汉大学学报(信息科学版)》下载免费的PDF全文 |
|