| 深海拖曳系统水下控制技术研究 |
| |
| 引用本文: | 李志彤, 董凌宇, 陆凯, 单瑞, 周吉祥. 深海拖曳系统水下控制技术研究[J]. 海洋地质前沿, 2023, 39(3): 30-39. doi: 10.16028/j.1009-2722.2022.037 |
| |
| 作者姓名: | 李志彤 董凌宇 陆凯 单瑞 周吉祥 |
| |
| 作者单位: | 1.中国地质调查局青岛海洋地质研究所,青岛 266237; 2.青岛海洋科学与技术国家实验室海洋矿产资源评价与探测技术功能实验室,青岛 266237; 3.自然资源部海底科学重点实验室,杭州 310012 |
| |
| 基金项目: | 国家自然科学基金“深海拖体主被动姿态调节及定深控制方法研究”(42106186);;中国地质调查局项目“深海调查-测量”(DD20191003); |
| |
| 摘 要: | 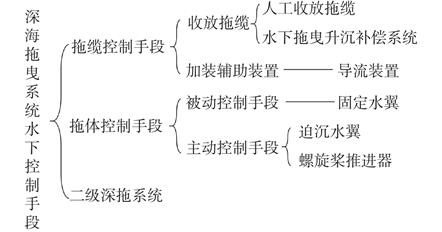
深海拖曳系统是人类开发利用海洋的一项重要手段。在众多深海探测装备中,深海拖曳系统以探测面积广、作业效率高、操控性能好等优势而得到了广泛应用。
针对深海拖曳系统水下控制技术,从控制手段和控制策略2个方面对其发展历程、国内外研究现状等进行梳理,分析对比不同控制手段的优缺点,并对深海拖曳系统水下控制技术未来的研究方向进行展望,以期为深海拖曳系统的应用与发展提供参考。

|
| 关 键 词: | 深海拖曳系统 水下控制技术 控制手段 控制策略 |
| 收稿时间: | 2022-02-10 |
|
| 点击此处可从《海洋地质前沿》浏览原始摘要信息 |
|
点击此处可从《海洋地质前沿》下载免费的PDF全文 |
|