|
|||||
|
|
| 对地观测技术最新进展评述 | |
| 引用本文: | 杨楠, 邵振峰, 郭丙轩, 彭哲, 黄蕾. 基于非固定初始面元的无人机影像点云优化算法[J]. 武汉大学学报 ( 信息科学版), 2016, 41(8): 1013-1020. DOI: 10.13203/j.whugis20140750 |
| 作者姓名: | 杨楠 邵振峰 郭丙轩 彭哲 黄蕾 |
| 作者单位: | 1.武汉大学测绘与遥感信息工程国家重点实验室, 湖北 武汉, 430079;2.武汉大学测绘遥感信息工程国家重点实验室深圳研发中心, 广东 深圳, 518057;3.深圳市地籍测绘大队, 广东 深圳, 518034 |
| 基金项目: | 国家重大设备专项(2012YQ16018505);国家科技支撑计划(2013BAH42F03);教育部新世纪优秀人才资助计划(NCET-12-0426);省部产学研结合项目(2012B090500016) |
| 摘 要: | 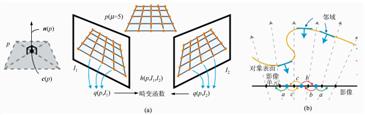 获取平台的不稳定性容易导致无人机影像的几何变形增大。如何高精度匹配这类影像是当前摄影测量与遥感领域的研究热点之一。 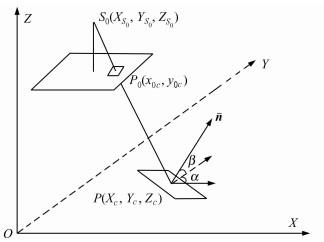 针对这个问题,提出基于非固定初始面元的无人机点云优化算法,采用差分代替微分计算地物表面局部正切平面的近似法向量,以此为初值建立初始物方面元进行匹配计算,并用两组数据进行实验验证。结果表明,基于非固定初始面元的无人机影像点云优化算法改进了基于物方面元的最小二乘匹配方法,优于基于面元的多视立体匹配(patch-based multi-view stereo matching and reconstruction,PMVS)中的点云优化方法,提高了点云优化的效率和精度。 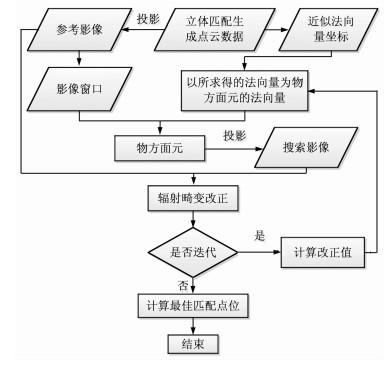 |
| 关 键 词: | 非固定面元 无人机影像 最小二乘匹配 点云优化 |
| 收稿时间: | 2015-11-03 |
General Review on the New Progress of Earth Observations |
|
| YANG Nan, SHAO Zhenfeng, GUO Bingxuan, PENG Zhe, HUANG Lei. Point Cloud Optimization for UAV Image Based on Non-fixed Initial Patch[J]. Geomatics and Information Science of Wuhan University, 2016, 41(8): 1013-1020. DOI: 10.13203/j.whugis20140750 | |
| Authors: | YANG Nan SHAO Zhenfeng GUO Bingxuan PENG Zhe HUANG Lei |
| Affiliation: | 1.State Key Laboratory for Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China;2.Shenzhen Research and Development Center of State Key Laboratory for Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Shenzhen 518057, China;3.ShenZhen Cadastral Surveying & Mapping Office, Shenzhen 518034, China |
| Abstract: | UAV platform instability causes large geometric deformation in UAV images and unsatisfactory matching accuracy. To address this problem, Point Cloud Optimization for UAV images based on a non-fixed initial patch algorithm is proposed in this paper. By using the difference to calculate approximate normal vector of local tangent plane instead of the differential, and by using this approximate normal vector to establish the initial patch. Two groups of images in campus of Northwestern University and Yangjiang Area were used to test this method. Experimental results show that the Point Cloud Optimization for UAV Image based on a non-fixed initial patch algorithm improved the Patch-based Least Squares Image Matching method, and was superior to the optimization method in PMVS. This method increased the efficiency and the accuracy of point cloud optimization. |
| Keywords: | non-fixed initial patch UAV images least squares image matching point cloud optimization |
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 | |
| 点击此处可从《武汉大学学报(信息科学版)》下载全文 | |