| AUV地形匹配导航快速收敛滤波 |
| |
| 引用本文: | 王汝鹏, 李晔, 马腾, 丛正, 贡雨森, 张强. 水下地形匹配定位置信区间估计[J]. 武汉大学学报 ( 信息科学版), 2019, 44(6): 830-836, 916. DOI: 10.13203/j.whugis20170281 |
| |
| 作者姓名: | 王汝鹏 李晔 马腾 丛正 贡雨森 张强 |
| |
| 作者单位: | 1.哈尔滨工程大学水下机器人技术重点实验室, 黑龙江 哈尔滨, 150001 |
| |
| 基金项目: | 国家重点研发计划(2017YFC0305700);国家自然科学基金(51879057);中央高校基本科研业务费(HEUCFG201810) |
| |
| 摘 要: | 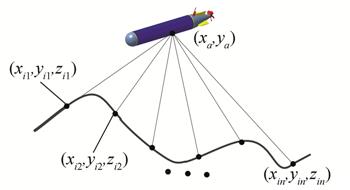
地形匹配定位(terrain aided position,TAP)的似然函数反映了AUV(autonomous underwater vehicle)的位置在空间中的分布概率,由于地形的强非线性、随机性以及测量误差的非高斯分布使得似然函数也表现出非高斯分布的特点。TAP的误差与局部地形特征和地形测量误差密切相关,由于现有的方法未考虑局部地形特征,仅考虑了测量误差的统计置信区间,使得TAP置信区间的估计结果明显偏小。为解决TAP置信区间的估计问题,建立了TAP定位点的跳变模型。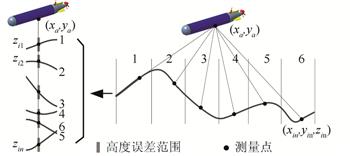
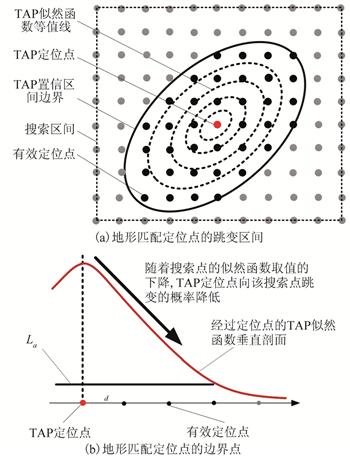
设TAP定位点Xp可以向搜索区间内任一点跳变,且向某一点的跳变概率与该点的似然函数值正相关,Xp向某一点跳变的置信度小于α时,认为xα不会向该点跳变,该点设为置信区间的边界点。另外,设地形匹配定位点的置信区间内匹配残差平方和函数为二次曲面,而Xp视为该曲面的待估计参数,则可以通过曲面参数的置信区间估计方法获得1-α置信度下的置信区间。新方法得到的置信区间范围大于现有的估计方法,试验结果表明,测量波束较少时,置信区间估计会出现异常,增加测量波束可以提高潮差和测量误差的估计精度,从而提高置信区间的估计精度,但测量误差非高斯分布条件下的补偿方法仍然需要进一步研究。
|
| 关 键 词: | AUV 地形匹配定位 置信区间估计 地形匹配定位置信度 地形匹配残差 |
| 收稿时间: | 2018-12-07 |
|
| 点击此处可从《武汉大学学报(信息科学版)》浏览原始摘要信息 |
|
点击此处可从《武汉大学学报(信息科学版)》下载免费的PDF全文 |
|