|
|||||
|
|
| 煤矿井下连续管钻进管柱分析及射流钻进实验 | |
| 引用本文: | 祖雨彤,王璐,巩达,等. 基于磁信标的水平定向钻进导向技术研究[J]. 煤田地质与勘探,2023,51(9):100−108. DOI: 10.12363/issn.1001-1986.23.05.0155 |
| 作者姓名: | 祖雨彤 王璐 巩达 胡远彪 |
| 作者单位: | 1.中国地质大学(北京) 工程技术学院,北京 100083;2.自然资源部深部地质钻探技术重点实验室,北京 100083 |
| 基金项目: | 国家自然科学基金联合基金项目(U22A20184);中国地质大学(北京)研究生创新项目(ZD2023YC016);国家自然科学基金青年科学基金项目(41902320) |
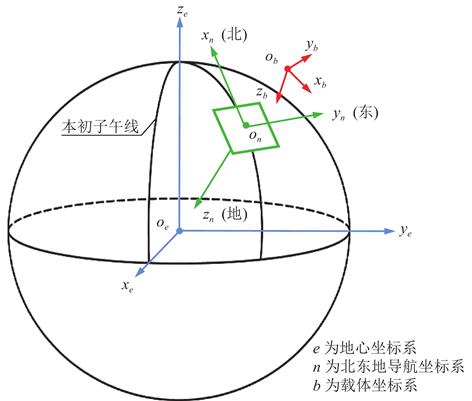
| 摘 要: | 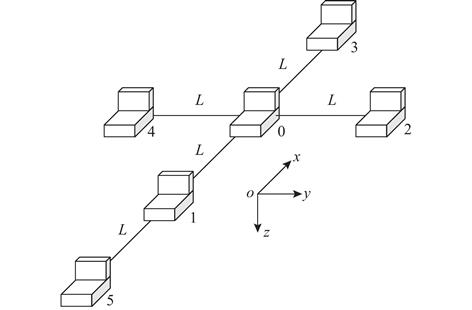 为了解决现有水平定向钻进导向方法测量精度低,定位深度浅,测量数据不连续以及受磁场干扰影响大的问题,提出一种基于磁信标的水平定向钻进导向定位方法,实现水平定向钻进的位置和姿态测量;设计了基于三阶磁梯度张量的测量阵列,通过仿真验证该方法可以消除地磁场的影响,实现位置测量;依据惯性导航理论,利用MEMS传感器、测量阵列位置信息和零速信息进行多源数据融合,对惯性导航解算出的姿态误差进行估计和修正,提高姿态测量精度。通过地面位置测量实验对基于三阶磁梯度张量的位置测量算法进行验证,位置测量结果的平均相对误差为4.57%;通过地面姿态测量实验对多源数据融合算法进行验证,结果表明,倾角误差在0.3°以内,工具面角误差在0.7°以内,方位角的误差值在1°以内,证明了提出的姿态测量算法的准确性和有效性。 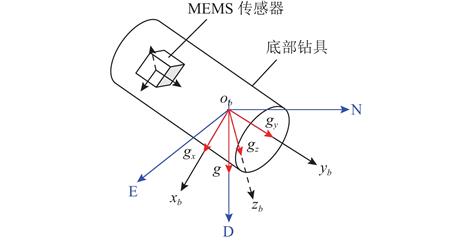 |
| 关 键 词: | 水平定向钻进 导向技术 磁信标 多源数据融合 位置测量 姿态测量 |
| 收稿时间: | 2023-03-30 |
| 修稿时间: | 2023-06-03 |
| 点击此处可从《煤田地质与勘探》浏览原始摘要信息 | |
| 点击此处可从《煤田地质与勘探》下载免费的PDF全文 | |