| 声学水面无人艇在浅水海底地貌调查中的应用 |
| |
| 引用本文: | 李勇航, 单晨晨, 苏明, 刘文涛, 雷亚平, 温明明, 蔡鹏捷. 声学水面无人艇在浅水海底地貌调查中的应用[J]. 海洋地质与第四纪地质, 2020, 40(6): 219-226. doi: 10.16562/j.cnki.0256-1492.2020052601 |
| |
| 作者姓名: | 李勇航 单晨晨 苏明 刘文涛 雷亚平 温明明 蔡鹏捷 |
| |
| 作者单位: | 1.中山大学海洋科学学院,珠海 519082;; 2.中国地质调查局广州海洋地质调查局,广州 510760 |
| |
| 基金项目: | 海南岛东北部沿海地区综合地质调查;地质调查标准化与标准制修订(广州海洋地质调查局)(DD20190473);中国地质调查项目 |
| |
| 摘 要: | 
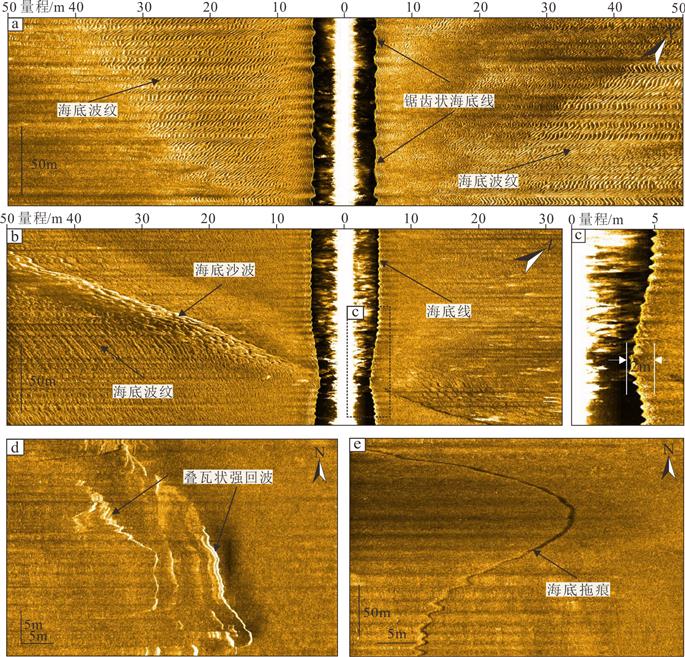
水面无人艇(USV,Unmanned Surface Vehicle)具有吃水浅、灵活机动、安全高效的特点和优势,日益成为浅水调查的重要手段。对于常规船只和考察人员不能到达的浅水环境的调查,无人艇具有填补甚至替代的价值和意义。C-Worker 4水面无人艇平台搭载了多波束测深、侧扫声呐、浅层剖面声学系统,运用脉冲同步控制和发射频率差异化配置的方法实现数据同步采集,旨在提高调查效率、优化调查方法和节约成本。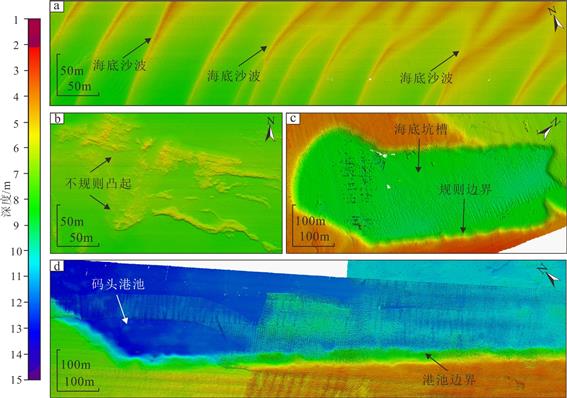
基于2019年在海南岛澄迈湾1.2~22 m浅水环境的调查数据,处理和分析评估表明其采集数据可靠性高,能清晰识别海底沙波、波纹、礁石、埋藏河道、港池、航道、拖痕等微地貌单元。研究证实水面无人艇搭载多源声学系统同步测量可提供精细、立体、可靠的海底地貌基础资料,服务于海岸带地质调查、资源开发、工程建设、水运交通和国防安全等。
|
| 关 键 词: | 无人艇 海底地貌 立体探测 多波束 侧扫声呐 浅层剖面 |
| 收稿时间: | 2020-05-26 |
| 修稿时间: | 2020-07-29 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《海洋地质与第四纪地质》浏览原始摘要信息 |
|
点击此处可从《海洋地质与第四纪地质》下载全文 |
|